- HOME >
- Motorized Stages Guide >
- Piezo Guide
- Measurement of Linear Stage Accuracy
- Measurement of Rotation Stage Accuracy
- Measurement of Goniometer Stage Accuracy
- Accuracy Verification
- Stepping Motors Guide
- Linear / Rotation / Goniometer
- GS/CS series Guide
- SGMV series Translation Motorized Stages AC servo Motor
- Vacuum Compatible Motorized Stage Guide
- Controllers
- Piezo Guide
- Drivers

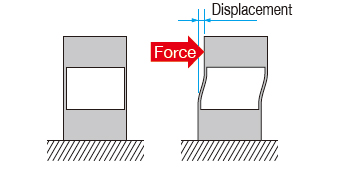
For the guide mechanism, Sigma fine stages adopted a guide system that utilizes elastic deformation of metals and
a mechanism to increase deformation of piezo elements.
These originally designed stages achieved readable resolution of 10nm during closed loop control,
ideal for uses that require high-speed high-precision positioning.
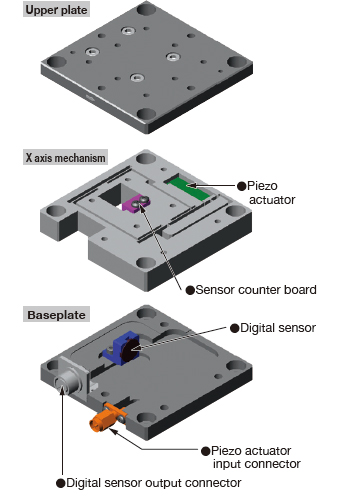
Piezo actuator and displacement magnification mechanism offer a large operating range.
Closed loop control is possible with a digital sensor that does not require any high precision analog amplifier or AD conversion circuit.
Use fine stages within the following operating environment temperature range.
Contact us separately if you desire to use the stages outside the operating environment temperature range.
* Operating environment
Temperature : 10℃ - 30℃
Humidity : 20% - 60% (without condensation)
* Recommended environment
Temperature : 20℃ ± 1℃
Humidity : 40% or lower
Since durability of piezo elements used in the SFS/SFS-H stage series will deteriorate in high humidity environments,
use them in the above environments.
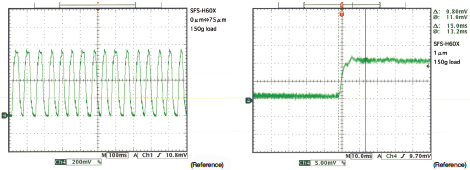
0⇔75µm pulse rate (16Hz)
Closed loop control
by SFS-H60X at 150g load
0⇒1µm step convergence data (15msec)
Closed loop control
by SFS-H60X at 150g load
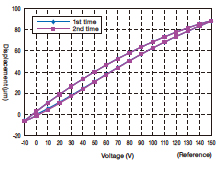
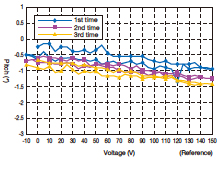
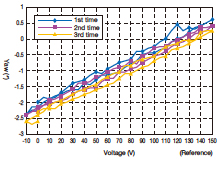
The following graph shows the hysteresis curve unique to piezo actuators during open loop control travel.
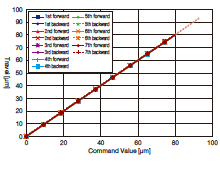
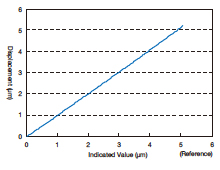
0⇔80µm linearity within 0.3%
Closed loop control
by SFS-H60X at 150g load
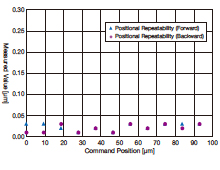
0⇔80µm positional repeatability
50nm or lower
by SFS-H60X at 150g load
Characteristics when feed amount is small in closed loop control. Hysteresis disappears in open loop control.
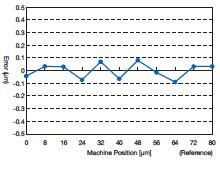
Deviation from the straight line in the direction of travel.
Tilt around the axis in the horizontal plane perpendicular to the direction of travel.
Rotation around the axis in the vertical plane perpendicular to the direction of travel.

input/output waveforms
(Step 50nm 20-step staircase wave)
input/output waveforms
(Uniform motion 35μm1Hz)